V roce 2006 bylo z fondu rozvoje vysokých škol financováno zakoupení nového vybavení pro naši laboratoř. Řešitelem tohoto projektu byl Prof. RNDr. Jozef Kelemen, DrSc. a spoluřešitelem byl Doc. Ing. Petr Čermák, Ph. D.
Problematika robotiky je v současnosti vysoce aktuální a to nejenom z důvodů hledání nových aplikačních možností informatiky, nýbrž i z důvodu hlubšího poznávání některých informatických jevů. Příkladem může být zkoumání vlivu dynamicky se měnících prostředí na povahu chování výpočetní technikou řízených zařízení (např. robotů), jevů umělé evoluce v tzv. multiagentových systémech, emergentních jevů apod. Tato problematika je natolik aktuální, že na Ústavu informatiky FPF SU existují nejen plány, ale již i první zkušenosti, jak ji promítnout do výuky informatiky.
Pro účely výuky byla na Ústavu informatiky FPF SU v Opavě postupně s použitím prostředků z různých zdrojů vybudována unikátní laboratoř pro informatické experimenty v oblasti kolektivní robotiky, která umožnila efektivně se zabývat systematickým studiem výše uvedených a jiných podobných jevů. Experimenty přinesly své výsledky.
Do experimentování byli zapojeni studenti informatických oborů na FPF SU v rámci svých diplomových projektů. Vznikla vysokoškolská učebnice věnovaná problematice agentů a multiagentových systémů, při jejiž zpracovávání byly uplatněny pedagogické zkušenosti s experimentováním, ke kterému mohlo dojít výlučně díky existenci zmíněné laboratoře.
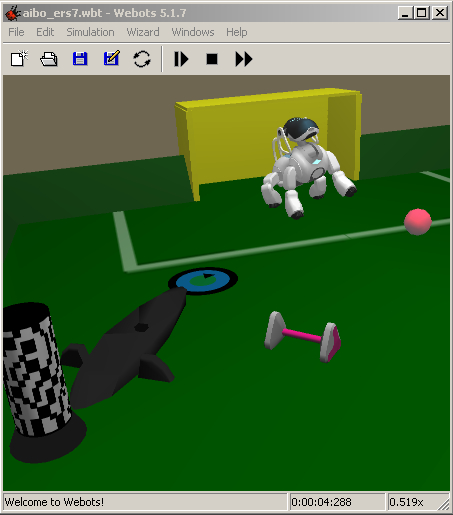
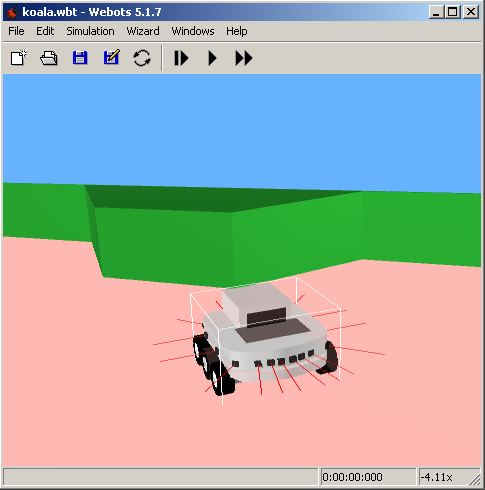
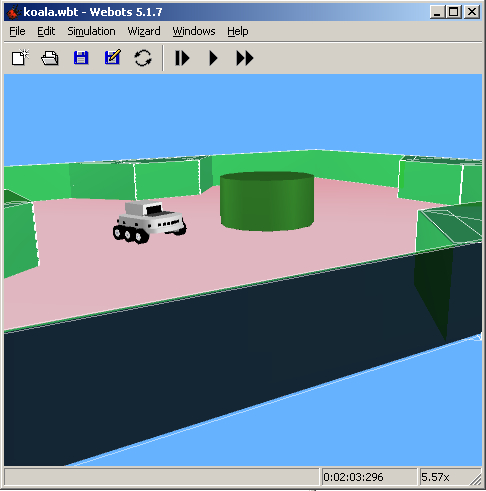
Byl zakoupen a nainstalován SW Webots 5.0 PRO od fy. Cyberbotics, který v rámci laboratoře umožňuje simulaci chování robotů v prvních fázích návrhů algoritmů.
Dále byly zakoupeny 2ks platforem/systémů robotů Khepera a Koala od fy. K-Team. Byly provedeny základní testy funkčnosti (Breitenbergův algoritmus a testovací programy dodávané výrobcem). Platformou Khepera II jsme nahradili již nefunkční kusy staršího modelu Khepera I.
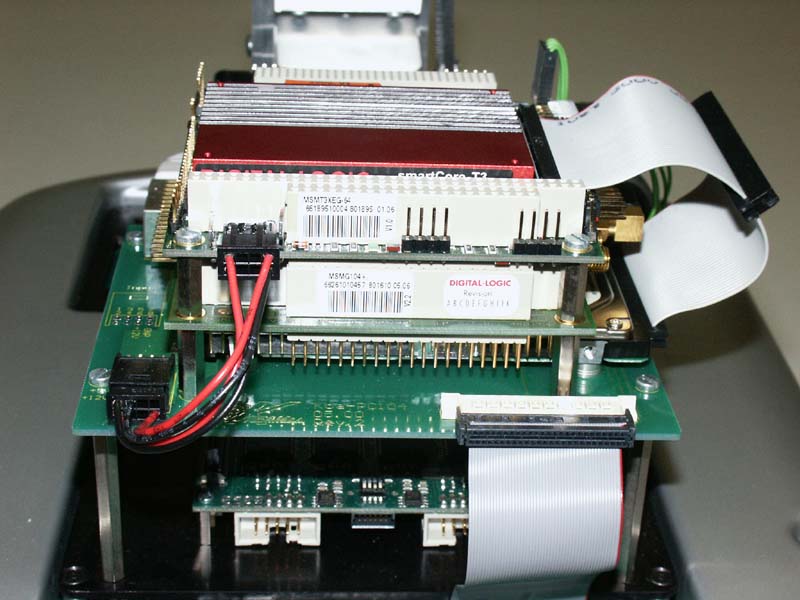
Platforma Koala umožňuje online snímání a analýzu obrazové scény přímo robotem s pomocí Kamery KoaPTCam, frame grabberu KoaPC104+. Základní jednotka PC104+ umožňuje zpracovat obrazový signál metodami počítačového vidění a řídit chování robota. Pro komunikaci je dále nutné rádiové ethernetové připojení se supervizním počítačem pomocí KoaPC104Eth. Ve spojení s akumulátory KoaAccu4 můžeme zajistit plnou autonomnost.
Pro pedagogické účely uveďme možnost výuky od vývoje na simulátoru až po testování na reálnem robotu. Právě při převodu ze simulátoru na reálného robota je vidět tzv. „fyzičnost“ robota se všemi problémy.