První laboratoř robotiky vznikla na Ústavu informatiky v roce 2002. Byla vybavena stolem o velikosti přibližně odpovídající velikosti arény na Robocupu v kategorii malých robotů. Ze začátku byla laboratoř vybavena 8 roboty Khepera s několika rozšiřujícími moduly a rádiovou stanicí. Později přibyli také dva roboti Koala s rozšiřujícími moduly.
V roce 2006 bylo z fondu rozvoje vysokých škol financováno zakoupení nového vybavení pro naši laboratoř. Řešitelem tohoto projektu byl prof. RNDr. Jozef Kelemen, DrSc. a spoluřešitelem byl doc. Ing. Petr Čermák, Ph.D.
Byl zakoupen a nainstalován SW Webots 5.0 PRO od firmy Cyberbotics, který v rámci laboratoře umožňuje simulaci chování robotů v prvních fázích návrhů algoritmů. Dále byly zakoupeny 2 ks platforem/systémů robotů Khepera a Koala od firmy K-Team. Byly provedeny základní testy funkčnosti (Breitenbergův algoritmus a testovací programy dodávané výrobcem). Platformou Khepera II jsme nahradili již nefunkční kusy staršího modelu Khepera I.
Platforma Koala umožňuje online snímání a analýzu obrazové scény přímo robotem s pomocí Kamery KoaPTCam, frame grabberu KoaPC104+. Základní jednotka PC104+ umožňuje zpracovat obrazový signál metodami počítačového vidění a řídit chování robota. Pro komunikaci je dále nutné rádiové ethernetové připojení se supervizním počítačem pomocí KoaPC104Eth. Ve spojení s akumulátory KoaAccu4 můžeme zajistit plnou autonomnost. Pro pedagogické účely uveďme možnost výuky od vývoje na simulátoru až po testování na reálném robotu. Právě při převodu ze simulátoru na reálného robota je vidět tzv. “fyzičnost” robota se všemi problémy.
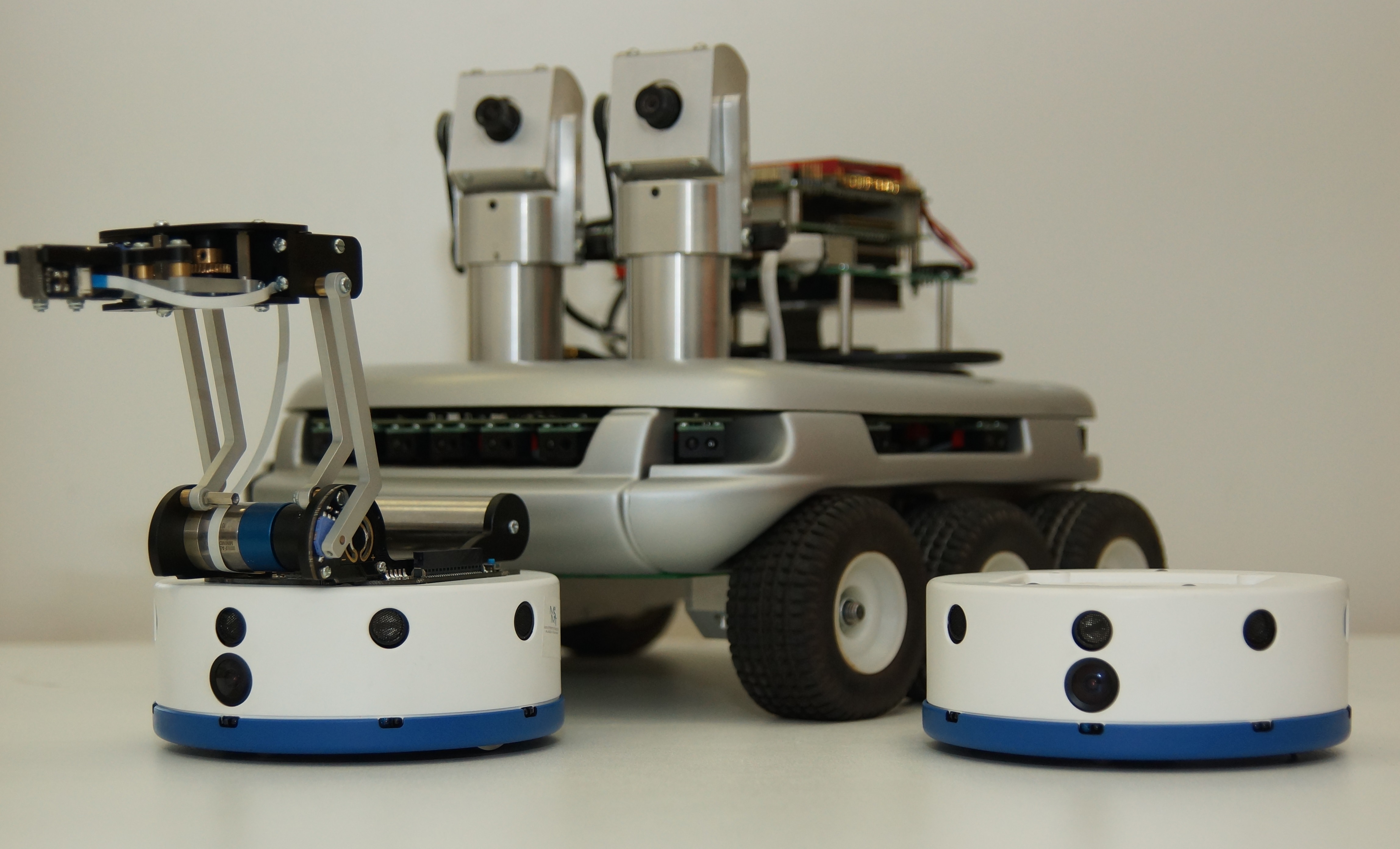
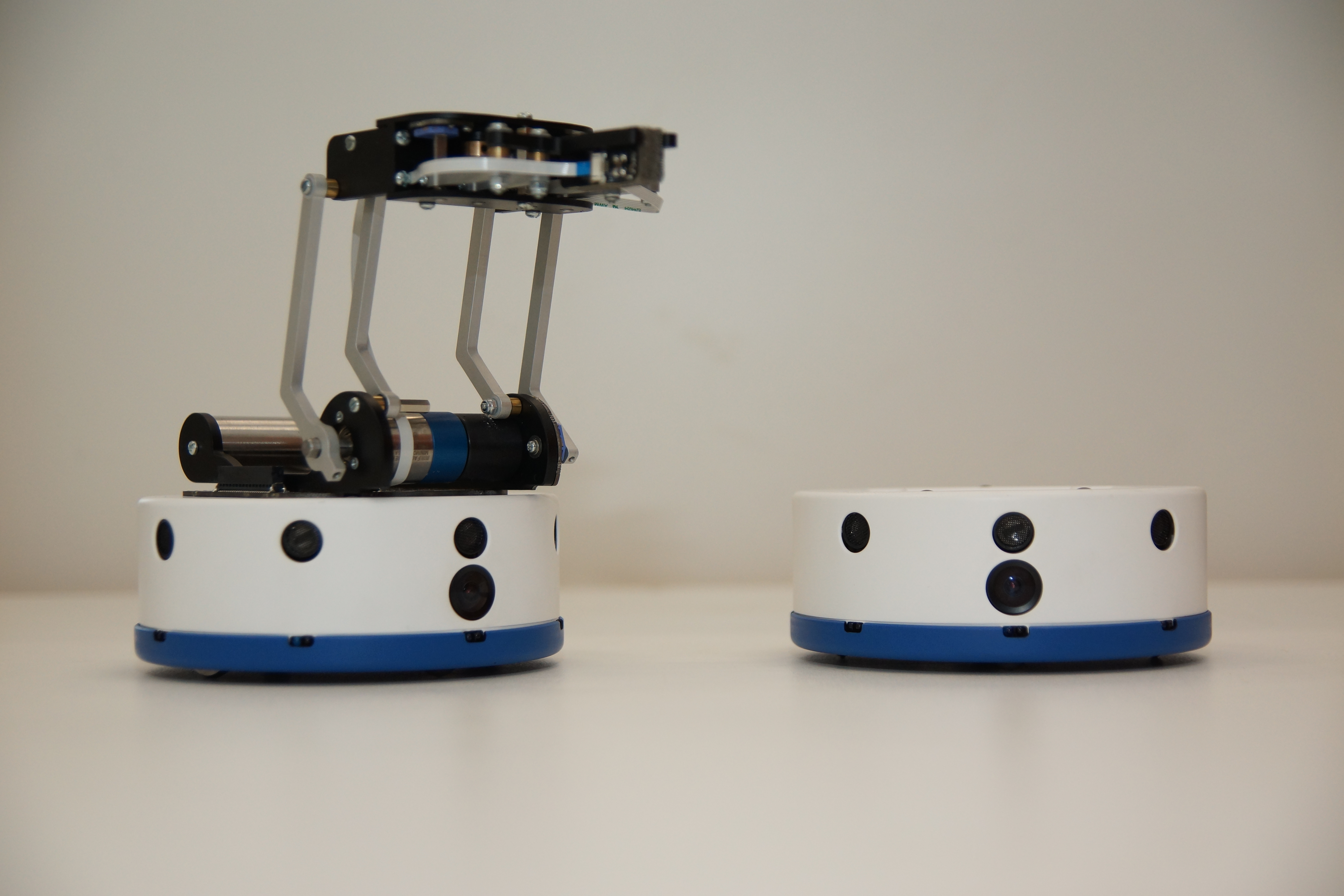
V roce 2014 bylo z prostředků projektu IT4Innovations pořízeno osm robotů Khepera IV, které v současné době tvoří základ robotické vybavení laboratoře pozemních jednotek. Robot Khepera IV je vybaven osmi infračervenými senzory po bocích a čtyřmi IR senzory pro sledování čáry, pěti ultrazvukovými senzory a barevnou kamerou s rozlišením 752×480 pixelů schopnou snímat 30 snímků za sekundu. Procesor Khepery IV tiká frekvencí 800 MHz. Jedná se o ARM Cortex-A8 Processor se C64x Fixed Point DSP core, který je dovybaven microcontrollerem pro správu periferií. K dispozici je 512 MB paměti RAM, 512 MB Flash, kterou je možno rozšířit o další 4 GB. O svém stavu nás Khepera může informovat pomocí tří programovatelných RGB LED diod. Jeden 0,7W reproduktor o rozsahu 400-20.000Hz sice není příliš vhodný ke kvalitní hudební produkci, ale pro práci s robotem postačí. Odposlouchávání okolí zajišťuje integrovaný mikrofon. Khepera je obdařena operačním systémem Linux, takže aplikace na ní běžící mohou být v podstatě napsány v libovolném programovacím jazyce, nicméně pro nativní on-board aplikace je vybavena GNU C/C++ compilerem. Ke komunikaci s Kheperou lze využít 1x USB 2.0 host (500mA), 1x USB 2.0 device, 802.11 b/g WiFi, Bluetooth 2.0 EDR. Baterie 7.4V Lithium Polymer o kapacitě 3400mAh umožňuje Khepeře pracovat cca. 7 hodin, pokud nebudeme uvažovat připojení dalších periferíí. Naše Khepery mohou být vybaveny laserovým čidlem pro měření vzdálenosti, který má větší dosah, nežli IR senzory a je vhodnější pro použití v uzavřeném prostoru či členitém terénu, než ultrazvuková čidla, která si mnohdy nedokáží poradit s náhodnými odrazy od různých překážek. Gripper umožňuje našim Kheperám nejen uchopit objekt o maximálním průměru 5 cm, ale i jej detekovat pomocí IR senzoru a měřit odpor uchopeného materiálu. Další senzory gripperu dávají informaci o jeho poloze a proudu jeho motoru.
Větší množství robotů umožňuje provádět i náročnější experimenty zaměřené na kolektivní chování, koordinaci, kooperaci, smečkové algoritmy a podobně.
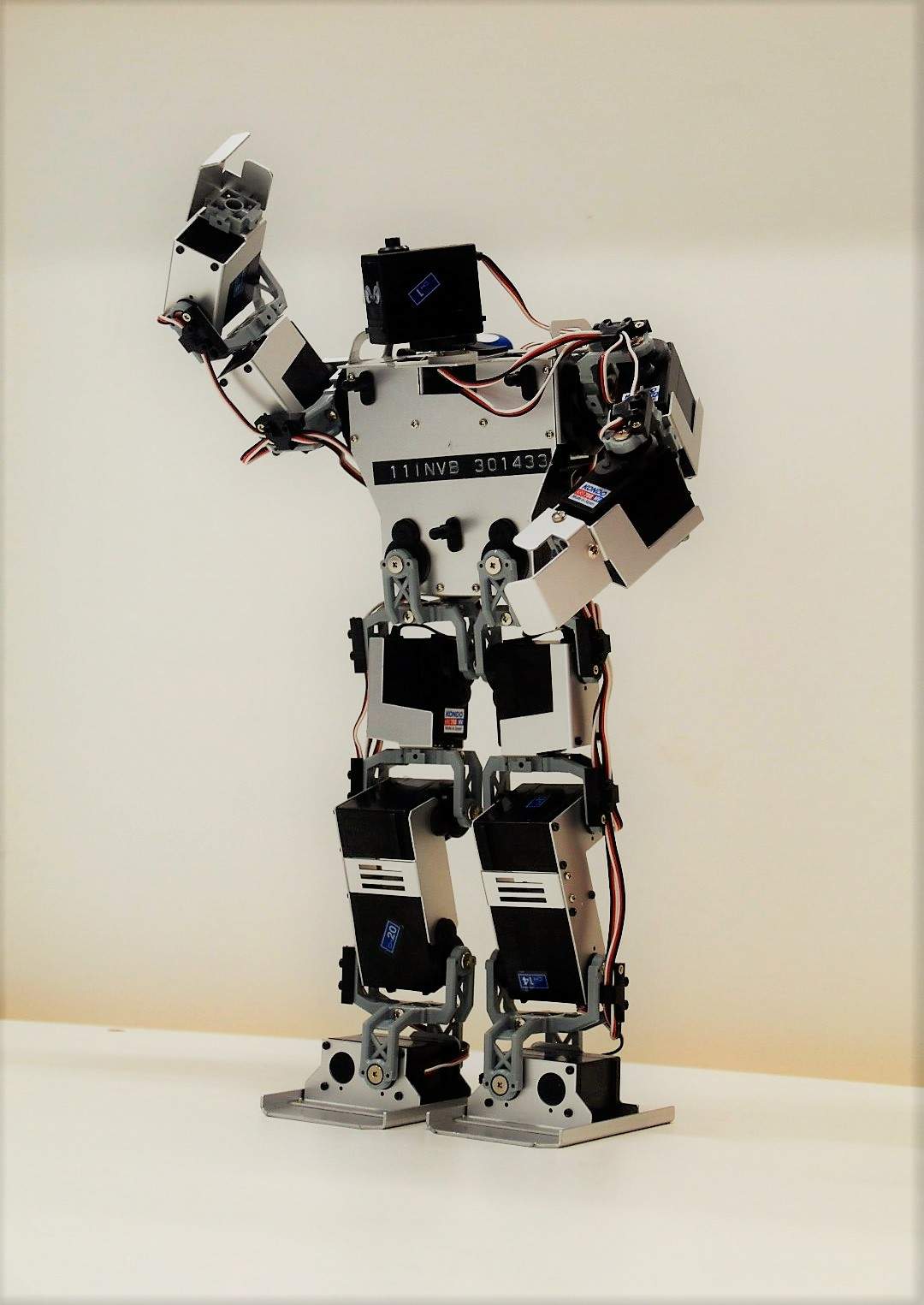
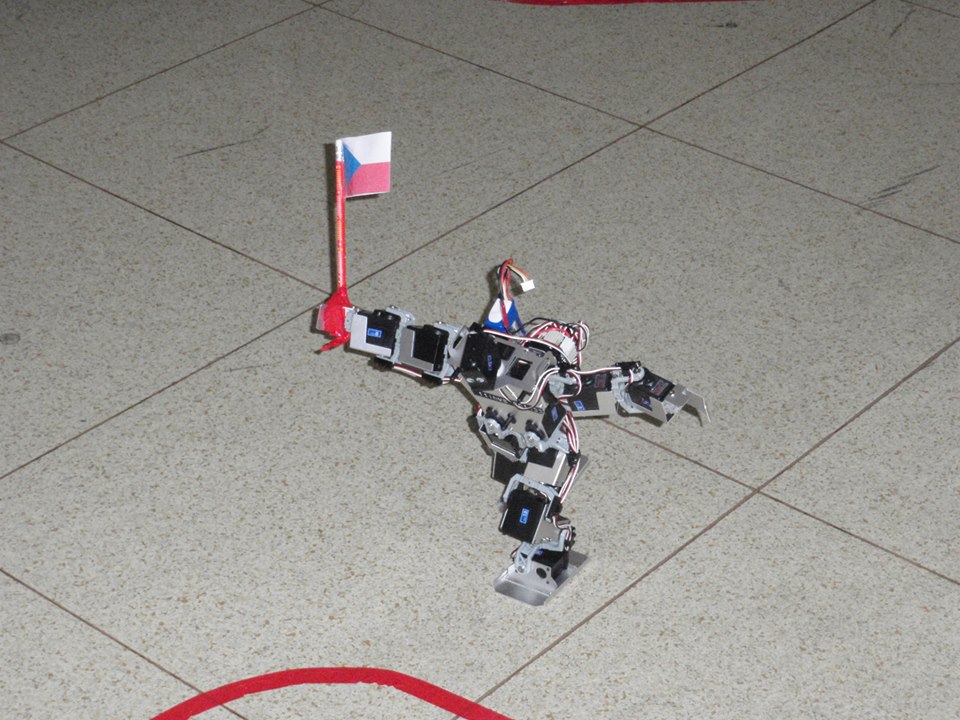
V laboratoři lze taktéž nalézt dva humanoidní roboty.